
人形机器人关节轴承必须选择靠谱的轴承,这是保证机器人运动性能、精度的重要环节,人形机器人关节轴承类型有哪些?
1、角接触球轴承,在构造中使用了球形滚动物支撑轴承旋转,球和内外圈之间的接触点是角接触点,可以同时承受径向负荷、轴向负荷,能在较高转速下工作。
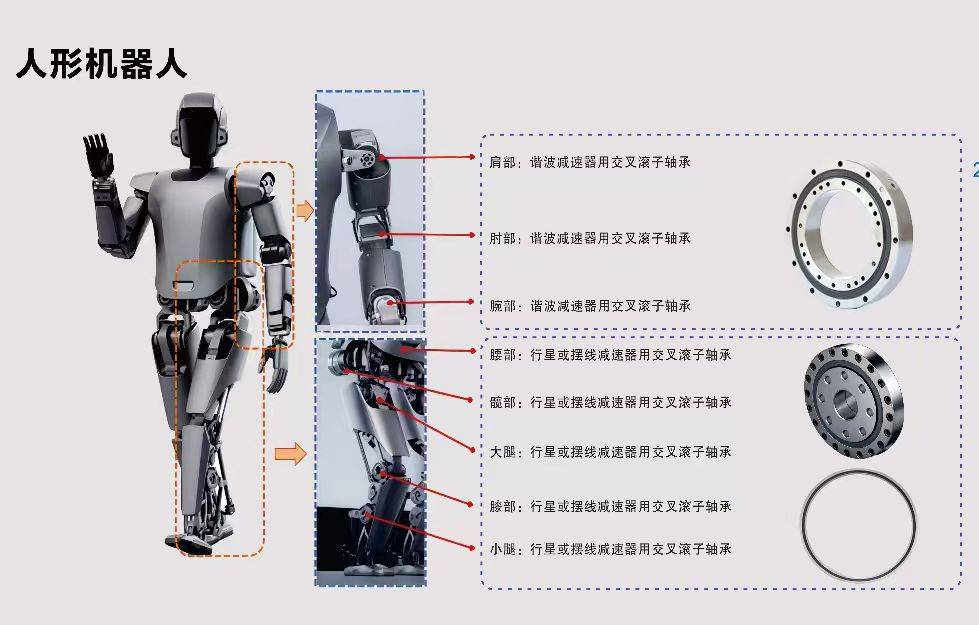
2、交叉滚子轴承,滚子垂直排列并以90度相互交叉,它们之间装有垫片或分离器,这样可以防止倾斜、摩擦或锁定。这种轴承具有高精度、高刚性、大承载、小空间等优点,被广泛应用于搬运机器人、精密机床、工业机械等领域。

人形机器人关节轴承用在哪些地方?
1、旋转关节,交叉滚子轴承和角接触球轴承是旋转关节的常用选择,能承受关节在旋转过程中产生的各种力和力矩,保证机器人的运动精度、稳定性。
2、线性关节,深沟球轴承和四点接触轴承则更多地应用于线性关节,能承受线性运动中的负荷,保证机器人线性运动准确性、平稳性。
人形机器人关节轴承选择因素:
1、承载能力,根据关节所需承受的负荷大小选择合适轴承。
2、精度和刚性,保证轴承能够满足机器人对运动精度和刚性要求。
3、体积和重量,考虑轴承的体积和重量对机器人整体设计影响。
4、成本,在满足性能要求的前提下,尽量控制成本。

